Can Communication System (For Rhd With Central Gateway Ecu) -- System Description |
| BRIEF DESCRIPTION |
The Controller Area Network (CAN) is a serial data communication system for real time application. It is a vehicle multiplex communication system which has a high communication speed and the ability to detect malfunctions.
Using the CANH and CANL bus lines as a pair, CAN communication is performed using a voltage differential. (A base voltage is applied to the pair of lines and a voltage differential is created when communicating.)
Many ECUs or sensors installed on the vehicle operate by sharing information and communicating with each other.
The V bus has termination circuits with two resistors of 60 Ω, and the bus 2, bus 3, bus 5, sub bus 1 and local bus each have termination circuits with two resistors of 120 Ω.
The CAN communication system is composed of 6 buses.
| DEFINITION OF TERMS |
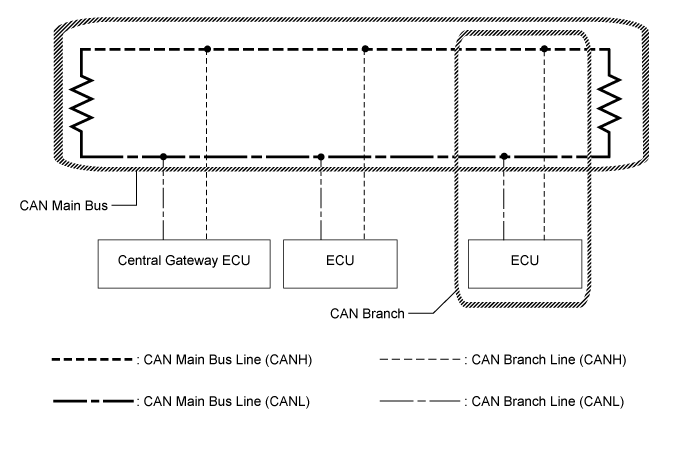
Main bus
The main bus is a wire harness between the two terminating resistors on the bus. This is the main bus in the CAN communication system.
Branch
A branch is a wire harness which diverges from the main bus to an ECU or sensor.
Terminating resistors
Two resistors of 120 Ω are installed in parallel across the ends of the CAN main bus lines. They are called terminating resistors. These resistors allow the changes of the voltage differential between the CAN bus lines to be accurately judged. To allow proper function of CAN communication, it is necessary to have both terminating resistors installed. Since the two resistors are installed in parallel, this results in a measurement of approximately 60 Ω.
| ECUS OR SENSORS WHICH COMMUNICATE THROUGH CAN COMMUNICATION SYSTEM |
V Bus
Central gateway ECU
DLC3
Bus 2
ECM
Combination meter assembly
Main body ECU (multiplex network body ECU)
Spiral with sensor cable sub-assembly (steering angle sensor)
Airbag sensor assembly
Headlight leveling ECU assembly
Central gateway ECU
Master cylinder solenoid (skid control ECU)
Steering control ECU*1
Power steering ECU assembly*2
4WD control ECU
Tire pressure warning ECU*3
Air conditioning amplifier assembly
Certification ECU (smart key ECU assembly)*4
- *1: w/ Variable Gear Ratio Steering System
- *2: w/ Variable Flow Control Solenoid Valve
- *3: w/ Tire Pressure Warning System
- *4: w/ Entry and Start System
- *1: w/ Variable Gear Ratio Steering System
Bus 3
Central gateway ECU
Multi-media module receiver assembly*1
Option connector*2
Bus buffer ECU*3
- *1: for Multi-media Module Receiver Type
- *2: w/ Option Connector
- *3: w/ Bus Buffer ECU
- *1: for Multi-media Module Receiver Type
Bus 5
Central gateway ECU
Clearance warning ECU assembly*1
Parking assist ECU*2
Driving support ECU assembly*3
Forward recognition camera*3
Millimeter wave radar sensor assembly*3
Inner rear view mirror assembly*4, *5
Suspension Control ECU*6
Blind spot monitor sensor LH*7
- *1: w/ TOYOTA Parking Assist-sensor System
- *2: w/ Multi-terrain Monitor System
- *3: w/ Pre-crash Safety System
- *4: w/o Pre-crash Safety System
- *5: w/ Automatic High Beam System
- *6: w/ Active Height Control Suspension
- *7: w/ Blind Spot Monitor System
- *1: w/ TOYOTA Parking Assist-sensor System
Sub Bus 1
Main body ECU (multiplex network body ECU)
Outer mirror control ECU assembly LH*1
Outer mirror control ECU assembly RH*1
Power seat switch assembly*1
Multiplex tilt and telescopic ECU*2
Power back door unit assembly (power back door ECU)*3
No. 2 main body ECU*4
- *1: w/ Memory
- *2: w/ Power Tilt and Power Telescopic Steering Column System
- *3: w/ Power Back Door System
- *4: w/ Tail Gate Closer System
- *1: w/ Memory
Local Bus*
Driving support ECU assembly
Forward recognition camera
Millimeter wave radar sensor assembly
- *: w/ Pre-crash Safety System
- *: w/ Pre-crash Safety System
| CIRCUIT DESCRIPTION |
The V bus has a termination circuit with a resistor of 60 Ω.
The bus 2, bus 3, bus 5, sub bus 1 and local bus each have termination circuits with two resistors of 120 Ω.
| TROUBLESHOOTING REMARKS |
DTCs for the CAN communication system can be checked using the GTS. The DLC3 is connected to the CAN communication system, but no DTCs exist regarding problems in the DLC3 or the DLC3 main lines. If there is any trouble in the DLC3 or the DLC3 main lines, ECUs on the CAN cannot output DTCs to the GTS.
| DIAGNOSTIC TROUBLE CODES FOR CAN COMMUNICATION SYSTEM |
- HINT:
- See Diagnosis System (Click here).
| HOW TO DISTINGUISH CONNECTOR OF CAN JUNCTION CONNECTOR |
In the CAN communication system, the shape of connectors connected to the CAN junction connector which has a ground terminal is the same. The connectors connected to the CAN junction connector can be distinguished by the colors of the bus lines and the connecting side of the junction connector.
- HINT:
- See Terminals of ECU for bus line color or the shape of connecting surface (Click here).