Система Помощи При Парковке Lexus, Основанная На Применении Датчиков -- Описание Системы |
| ОБЩИЕ СВЕДЕНИЯ |
Когда автомобиль движется со скоростью 10 км/час (6 миль в час) или ниже, ультразвуковые датчики на переднем и заднем бамперах обнаруживают препятствия вблизи автомобиля. На основе сигналов, передаваемых датчиком положения рулевого колеса, ультразвуковые датчики оценивают вероятность столкновения. Затем эта информация выдается с использованием многофункционального дисплея, мультиинформационного дисплея и зуммера.
| НАЗНАЧЕНИЕ УЗЛОВ И ДЕТАЛЕЙ |
| Узлы и детали | Функция |
| Ультразвуковой датчик | Излучает ультразвуковые волны с целью обнаружения препятствий вблизи автомобиля и передает сигнал в ЭБУ предупреждения о недопустимой дистанции |
| Главный выключатель системы ультразвуковой локации |
|
| Зуммер предупреждения о недопустимой дистанции | Издает звуковые сигналы в соответствии с командами ЭБУ предупреждения о недопустимой дистанции |
| ЭБУ предупреждения о недопустимой дистанции |
|
| Датчик угла поворота рулевого колеса |
|
| Щиток приборов | Принимает сигнал скорости автомобиля (условие работы системы) из ЭБУ системы противоскольжения и передает его по шине BEAN в ЭБУ предупреждения о недопустимой дистанции. Кроме того, по шине BEAN щиток приборов получает информацию от ЭБУ предупреждения о недопустимой дистанции, и данные распознавания выводятся на мультиинформационном и многофункциональном дисплеях. |
| ЭБУ рулевого управления | Передает сигнал рулевого управления с переменным передаточным числом (для каждого направления поворота) в ЭБУ предупреждения о недопустимой дистанции по шине CAN |
| Многофункциональный дисплей | По шинам BEAN и AVC-LAN получает информацию из ЭБУ предупреждения о недопустимой дистанции и отображается данные распознавания |
| Датчик положения паркинга/нейтрали | Передает данные о положении рычага переключения передач (условие работы системы) в ЭБУ предупреждения о недопустимой дистанции по шине BEAN |
| ОПИСАНИЕ РАБОТЫ |
Режим контроля рулевого управления
Ультразвуковые датчики на переднем бампере оценивают расстояние до препятствия и угловое расположение препятствия по отношению к автомобилю. Если препятствие располагается в пределах зоны распознавания датчика, после получения датчиком информации о препятствии и сигналов от датчика положения рулевого колеса дается приблизительная оценка возможности столкновения (которая используется для повышения вероятности предотвращения столкновения), и соответствующие данные выдаются посредством дисплеев и зуммера.
- УКАЗАНИЕ:
- Упомянутыми выше дисплеями являются мультиинформационный и многофункциональный дисплеи.
- Информацию о диапазоне распознаваемых дистанций датчика см. в разделе "ПРОВЕРКА РАБОТЫ" (см. стр. Нажмите здесь).
Обычный режим ультразвуковой локации
Распознаются все препятствия, попадающие в зону распознавания датчика, независимо от данных датчика положения рулевого колеса.
Условия перехода в обычный режим ультразвуковой локации В настройках пользователя выбран режим "Normal clearance sonar mode" (обычный режим ультразвуковой локации) Нарушена работа датчика(ов) Прекратили поступать сигналы датчика положения рулевого колеса и рулевого управления с переменным передаточным числом Выполняется настройка нейтрального положения рулевого колеса Диапазон распознаваемых дистанций в обычном режиме ультразвуковой локации
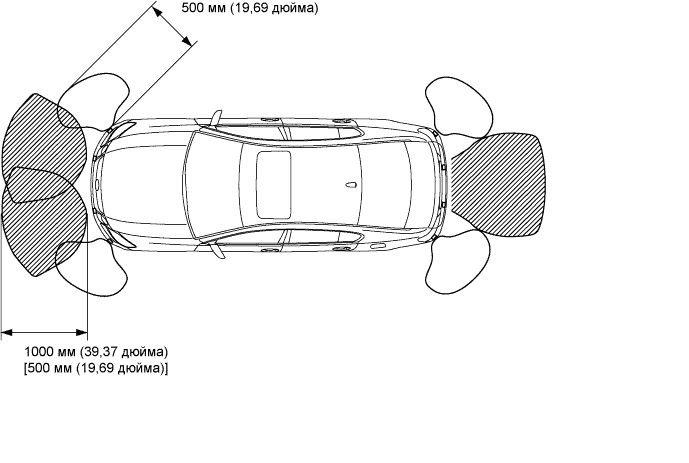
- УКАЗАНИЕ:
- Значение в скобках [ ] представляет собой значение, которое может быть установлено при пользовательской настройке.