Регулируемая Адаптивная Подвеска -- Описание Системы |
| ОПИСАНИЕ СИСТЕМЫ |
ЭБУ амортизатора
- Демпфирующее усилие амортизатора может переключаться отдельно для каждого из 4 колес, исходя из информации от датчиков, при этом режим задается управляющим переключателем амортизатора.
- Для переключения демпфирующего усилия используются следующие виды управления: управление согласно скорости автомобиля, осуществляемое в зависимости от условий езды; управление, препятствующее продольному наклону кузова при торможении; управление, препятствующее продольному наклону кузова при разгоне; регулирование угловых колебательных движений; управление для устранения вибрации (управление H∞), осуществляемое в соответствии с движением автомобиля (состоянием дорожной поверхности); управление для ослабления тряски и управление вибрацией неподрессоренной массы (гашение колебаний неподрессоренной массы). Кроме того, выполняется координированное управление VSC для поддержания курсовой устойчивости.
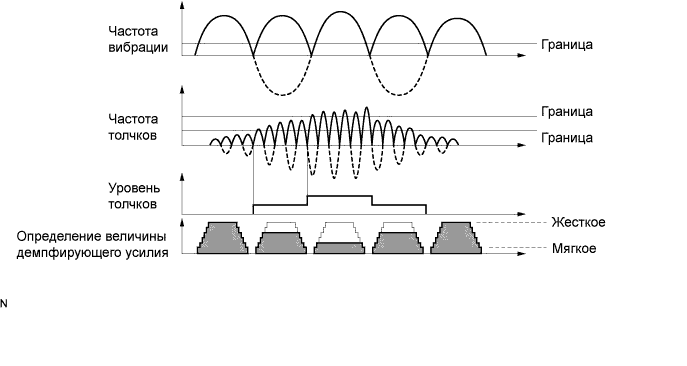
- Точное регулирование демпфирующего усилия достигается благодаря применению нелинейного управления H∞, основанного на современной теории снижения вибраций. Для обеспечения гладкой характеристики регулирования демпфирования при изменении условий езды частота толчков и вибраций контролируется на основе сигналов датчика ускорения в сборе, а частота резонанса колебаний неподрессоренной массы – исходя из сигналов датчиков частоты вращения колес.
- Демпфирующее усилие амортизатора может переключаться отдельно для каждого из 4 колес, исходя из информации от датчиков, при этом режим задается управляющим переключателем амортизатора.
Управление на основе сигналов датчиков частоты вращения
- За счет оптимальных настроек регулировки демпфирующего усилия в соответствии со скоростью автомобиля на основе информации, передаваемой датчиками частоты вращения колес, удается добиться сочетания плавности езды на низкой скорости и удобства управления и устойчивости на высокой скорости.
- За счет оптимальных настроек регулировки демпфирующего усилия в соответствии со скоростью автомобиля на основе информации, передаваемой датчиками частоты вращения колес, удается добиться сочетания плавности езды на низкой скорости и удобства управления и устойчивости на высокой скорости.
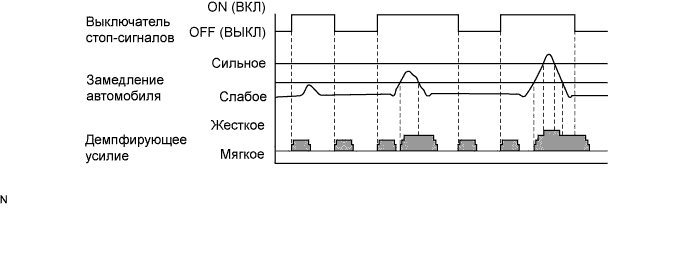
Управление, препятствующее продольному наклону кузова при торможении
- Управление, препятствующее продольному наклону кузова при торможении, гарантирует удобство управления и устойчивость (смягчение продольного "клевка", вызванного изменением скорости во время замедления) благодаря точной регулировке демпфирующего усилия в зависимости от продольного наклона кузова, выявленного при торможении, исходя из сигналов частоты вращения колес и сигналов от выключателя стоп-сигналов.
- Удобство управления и устойчивость в процессе торможения, а также плавный ход обеспечиваются путем установки большого демпфирующего усилия при интенсивном замедлении (высоком G) и при отпускании водителем педали тормоза.
- Управление, препятствующее продольному наклону кузова при торможении, гарантирует удобство управления и устойчивость (смягчение продольного "клевка", вызванного изменением скорости во время замедления) благодаря точной регулировке демпфирующего усилия в зависимости от продольного наклона кузова, выявленного при торможении, исходя из сигналов частоты вращения колес и сигналов от выключателя стоп-сигналов.
Управление, препятствующее продольному наклону кузова при разгоне
- ЭБУ гибридной системы определяет крутящий момент приводного вала и за счет точного регулирования демпфирующего усилия снижает прижатие автомобиля к поверхности, тем самым, повышая удобство управления и устойчивость.
- ЭБУ гибридной системы определяет крутящий момент приводного вала и за счет точного регулирования демпфирующего усилия снижает прижатие автомобиля к поверхности, тем самым, повышая удобство управления и устойчивость.
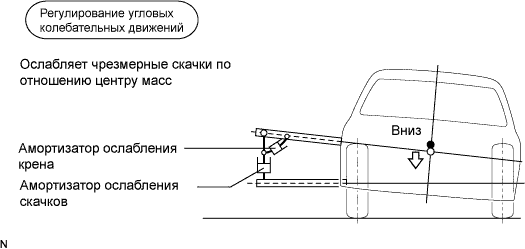
Регулирование угловых колебательных движений
- Удобство управления и устойчивость на поворотах достигаются благодаря регулировке демпфирующего усилия в соответствии с величиной боковой составляющей ускорения, вычисленной по сигналам угла поворота от датчика угла поворота рулевого колеса и сигналам скорости автомобиля от датчиков частоты вращения колес.
- Внешнее демпфирующее усилие, создаваемое при повороте колеса внутрь или наружу (независимо для каждого из 4 колес), регулируется с использованием принципов теории управления согласно модели угловых колебательных движений для амортизаторов (ослабления крена и скачков), вследствие чего происходит гашение колебаний в 2 направлениях от мнимой точки, когда колесо поворачивается внутрь, как показано на рисунке ниже. Это позволяет добиться превосходной устойчивости и эксплуатационной пригодности, и гарантировать управляемость на поворотах и при выполнении маневров, а также хорошее сцепление с поверхностью дороги за счет оптимального управления колесами во время вращения.
- Удобство управления и устойчивость на поворотах достигаются благодаря регулировке демпфирующего усилия в соответствии с величиной боковой составляющей ускорения, вычисленной по сигналам угла поворота от датчика угла поворота рулевого колеса и сигналам скорости автомобиля от датчиков частоты вращения колес.
Управление для устранения вибрации (управление H∞)
- Если вибрация в продольном и поперечном направлениях незначительна, ее можно контролировать, увеличивая демпфирующее усилие в течение заданного времени. Если вибрация велика, простое повышение демпфирующего усилия не сможет обеспечить плавность движения. Поэтому, чтобы сочетать хорошую демпфирующую способность с максимально плавным ходом, вибрации регулируются с использованием теории нелинейного управления H∞.
- Автомобиль оснащен 3 датчиками ускорения, которые используются для определения рессорного ускорения на неровной дорожной поверхности и вычисления хода подвески с применением методов современной теории управления. На основе вычисленных нагрузок методами теории управления H∞ рассчитывается требуемое демпфирующее усилие, которое затем регулируется отдельно для каждого из 4 колес.
- Для регулировки рессорного (амортизационного) ускорения амортизатор изменяет демпфирующее усилие согласно состоянию дорожной поверхности, стабилизируя коэффициент использования энергии рессорного ускорения на заданном уровне.
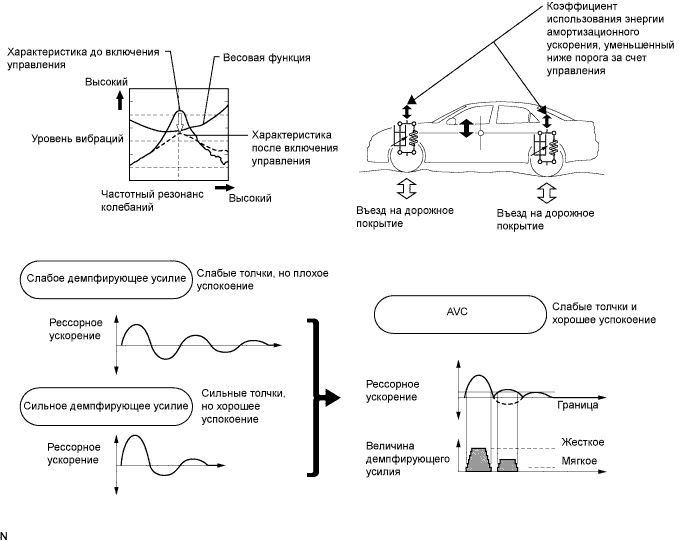
- Если управление состоянием автомобиля осуществляется только с помощью демпфирующего усилия амортизатора, и последнее значительно изменяется, могут легко возникать колебания рессорного ускорения.
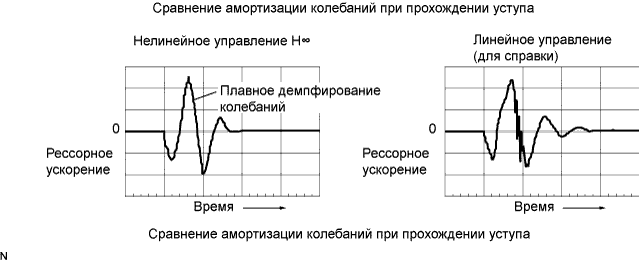
- Естественное и плавное устранение колебаний рессорного демпфирования обеспечивается благодаря применению теории нелинейного управления H∞.
- Если вибрация в продольном и поперечном направлениях незначительна, ее можно контролировать, увеличивая демпфирующее усилие в течение заданного времени. Если вибрация велика, простое повышение демпфирующего усилия не сможет обеспечить плавность движения. Поэтому, чтобы сочетать хорошую демпфирующую способность с максимально плавным ходом, вибрации регулируются с использованием теории нелинейного управления H∞.
Управление для ослабления тряски
- Когда во время движения по нервной дорожной поверхности на основе сигналов датчиков ускорения определяется частота между частотой резонанса колебаний подрессоренной массы и частотой резонанса колебаний неподрессоренной массы (частота тряски), на которой одновременно происходят тряска и вибрации, демпфирующее усилие становится сравнительно низким, что дает возможность обеспечить ощущение плавного движения внутри автомобиля без снижения плавности хода.
- Когда во время движения по нервной дорожной поверхности на основе сигналов датчиков ускорения определяется частота между частотой резонанса колебаний подрессоренной массы и частотой резонанса колебаний неподрессоренной массы (частота тряски), на которой одновременно происходят тряска и вибрации, демпфирующее усилие становится сравнительно низким, что дает возможность обеспечить ощущение плавного движения внутри автомобиля без снижения плавности хода.
Управление вибрацией неподрессоренной массы (гашение колебаний неподрессоренной массы)
- Если на основе сигналов датчиков частоты вращения колес регистрируется резонанс неподрессоренной массы, демпфирующее усилие повышается на установленный период времени, чтобы обеспечить хорошее сцепление с дорожной поверхностью без снижения плавности хода.
- Если на основе сигналов датчиков частоты вращения колес регистрируется резонанс неподрессоренной массы, демпфирующее усилие повышается на установленный период времени, чтобы обеспечить хорошее сцепление с дорожной поверхностью без снижения плавности хода.
Управление работой VSC (координированное управление VSC)
- Благодаря надлежащему переключению демпфирующего усилия на основе сигналов ЭБУ системы противоскольжения согласно изменениям состояния дорожной поверхности (μ) и боковому уводу автомобиля удается добиться максимальной эффективности системы VDIM (VSC).
- Благодаря надлежащему переключению демпфирующего усилия на основе сигналов ЭБУ системы противоскольжения согласно изменениям состояния дорожной поверхности (μ) и боковому уводу автомобиля удается добиться максимальной эффективности системы VDIM (VSC).
| ХАРАКТЕРИСТИКА ДЕМПФИРОВАНИЯ |
Управляющий переключатель амортизатора позволяет выбрать один из двух режимов: NORMAL или SPORT.
В режиме NORMAL (нормальный) наибольший приоритет отдается плавности хода. При движении в нормальных условиях демпфирующее усилие минимально.
В режиме SPORT (спортивный) демпфирующее усилие увеличивается даже при движении в нормальных условиях. Благодаря расширенному диапазону высоких демпфирующих усилий, даже когда на демпфирующее усилие оказывают влияние условия езды и состояние дороги, режим SPORT характеризуется улучшенными управляемостью и устойчивостью.
| РАБОТА В АВАРИЙНОМ РЕЖИМЕ (см.стр. Нажмите здесь) |
Когда в системе AVS (системе регулируемой адаптивной подвески) возникает неисправность, загорается контрольной лампы амортизатора и действие AVS блокируется.
| РЕЖИМЫ DATA LIST / ACTIVE TEST (см. стр. Нажмите здесь). |
DATA LIST
В режиме Data List на дисплей портативного диагностического прибора можно вывести данные о состоянии переключателей, датчиков, ЭБУ и других устройств без снятия каких-либо деталей.
Снятие показаний в режиме Data List на начальном этапе диагностики – это один из способов сократить время, затрачиваемое на поиск неисправности.ACTIVE TEST
Режим Active Test портативного диагностического прибора позволяет управлять реле, ЭБУ и т.д. без снятия деталей с автомобиля.
Выполнение испытаний Active Test на начальном этапе диагностики – это один из способов сократить время, затрачиваемое на поиск неисправности.
| НАЗНАЧЕНИЕ УЗЛОВ И ДЕТАЛЕЙ |
| Узлы и детали | Функция |
| Управляющий переключатель амортизатора (переключатель EMS) | Задает режим демпфирования амортизатора (NORM или SPORT) |
| Датчик угла поворота рулевого колеса |
|
| Датчик ускорения в сборе (правый передний) |
|
| Датчик ускорения в сборе (левый передний) |
|
| Датчик ускорения в сборе (задний) |
|
| Датчик частоты вращения (ЭБУ системы противоскольжения) |
|
| Привод амортизатора |
|
| ЭБУ амортизатора |
|