Clearance Sonar System -- System Description |
| GENERAL |
When the vehicle is driven at 10 km/h (6 mph) or less, the ultrasonic sensors on the front and rear bumper detect obstacles near the vehicle. Based on signals from the steering sensor, the ultrasonic sensors perform a collision/avoidance judgment. Then they communicate the information through the multi-display, multi-information display, and buzzer.
| FUNCTION OF COMPONENTS |
| Components | Function |
| Ultrasonic sensor | Transmits ultrasonic waves to detect obstacles near vehicle and outputs signal to clearance warning ECU |
| Clearance sonar main switch | Built into outer mirror switch Outputs system ON/OFF signals to clearance warning ECU via BEAN |
| Clearance warning buzzer | Sounds according to commands from clearance warning ECU |
| Clearance warning ECU | Receives signals from various systems and determines system operation condition Amplifies and processes sent and received ultrasonic waves, makes judgments about obstacles, controls indicator light and warning buzzer, and detects sensor malfunctions |
| Steering sensor | Built into steering column Outputs steering angle and direction signals (avoidance judgment condition) to clearance warning ECU via CAN |
| Combination meter | Receives vehicle speed signal (system operation condition) from skid control ECU, and then outputs it to clearance warning ECU via BEAN Combination meter then receives information from clearance warning ECU through BEAN communication, and detection information is displayed on multi-information display and multi-display |
| Steering control ECU | Outputs variable gear ratio steering signal (in either steering direction) to clearance warning ECU via CAN |
| Multi-display | Receives information from clearance warning ECU through BEAN and AVC-LAN, and then displays detection information |
| Park/Neutral position switch | Outputs shift lever position information (system operation condition) to clearance warning ECU via BEAN |
| OPERATION EXPLANATION |
Steering sensing mode
The ultrasonic sensors on the front bumper estimate the distance to an obstacle, and the angle of the obstacle in relation to the vehicle. When the sensor receives information about the obstacle and signals from the steering sensor, and the obstacle is within the sensor's detection area, an approximate collision/avoidance judgment is made (to be used as an estimate to increase the possibility of avoiding a collision), and the information is communicated through the displays and buzzer.
- HINT:
- The displays mentioned above refer to the multi-information display and multi-display.
- Refer to "OPERATION CHECK" for the sensor detection range (Click here).
Normal clearance sonar mode
All obstacles in the sensor detection range are detected regardless of the information from the steering sensor.
Conditions in which system will change to normal clearance sonar mode "Normal clearance sonar mode" is selected using customization function Sensor(s) are malfunctioning Steering sensor signal and variable gear ratio steering signal stop When performing mid-point learning operation Normal clearance sonar mode detection range
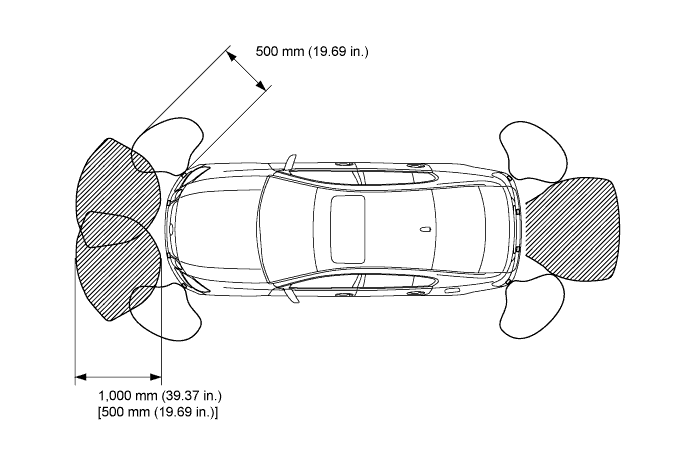
- HINT:
- The value within the [ ] marks is a customize setting.